阅读:0
听报道

作者:魏子敏、蒋宝尚
网红人形机器人Atlas已经可以完成很多人类无法做到的事情,包括后空翻和跑步穿越雪地。现在,他又get了跑酷的新技能。

今年五月份波士顿在YouTube上放出了两段视频,里面的机器狗和机器人分别表演了他们的绝活。其中,机器人Atlas在田野中奔跑、还非常流畅的跳跃过了一条障碍木头。

刚刚,波士顿又放出了一段机器人Atlas视频。升级版的Atlas不在单纯的满足跳过小木棍儿,现在他开始表演跑酷特技了。
一开始,Atlas爬上40厘米(1.3英尺)的台阶之前,从原木上跳了一步。虽然让一个笨重的大型机器人用两只脚行走是非常不容易的事情,但是这次在台阶上三连跳却是一个更大的挑战。因为,让Atlas的四肢向上和跨出台阶,同时适当地将重心和动作转移到一只脚上并不容易。另外,整个机器人重量为180磅,约为82千克,比一个成年人重不了多少。
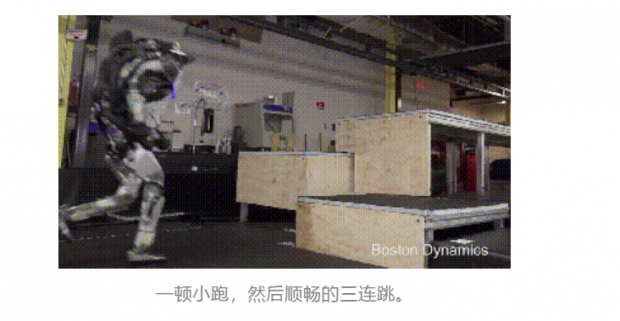
注意看视频中机器人的侧向跳跃,在9秒左右的慢动作回放中,我们可以清晰的看出机器人的臀部和脚的动作是互补的。也就是说,在一定的程度上,机器人的各部位已经可以一定程度上协同工作了。
这段跑酷表演,让我们有理由相信,Atlas已经具备了在崎岖不平的山谷中行走的能力,甚至可以说,Atlas已经能够达到人类水平的行走了。
从理论上讲,和我们拥有同样行走能力的机器人是帮助我们管理世界的最佳装备。
根据行走方式,机器人可分为轮式、足式、履带式及混合式。轮式机器人主要适合平坦的路面,具有高速移动性能,但对复杂的地形却无能为力;履带式机器人能更好的适应松软的地形,如土地,缺点是对高度落差较大的地形无能为力;足式机器人几乎可以适应各种复杂的地形,缺点是移动速度较低,且由于重心原因容易侧翻。
世界上大部分地形属于复杂地形,对于复杂的地形足式机器人有着明显的优势,所以足式机器人的研究有着广阔的发展前景。
足式机器人最值得探索的地方也正在于此——能够在非结构化和不平整的地形上航行。
这并不是说其他机器人形状因素也不会占有一席之地。波士顿动力公司的SpotMini四足机器人也有着非常不错的表现。
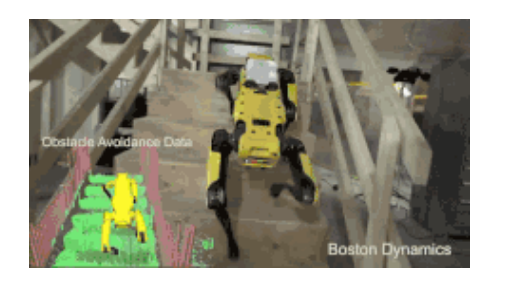
四足、甚至六足的爬行机器人更加稳定,但从波士顿动力的网红机器人Atlas,到伯克利的ATRIAS,足式机器人正在成为近期机器人行列中的“C位”。
话题:

0
推荐
财新博客版权声明:财新博客所发布文章及图片之版权属博主本人及/或相关权利人所有,未经博主及/或相关权利人单独授权,任何网站、平面媒体不得予以转载。财新网对相关媒体的网站信息内容转载授权并不包括财新博客的文章及图片。博客文章均为作者个人观点,不代表财新网的立场和观点。
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}